
空间地球科学及应用 |
国际空间站GNSS 反射、无线电掩星和散射探测(GEROS-ISS) GEROS-ISS是国际空间站ISS上的GNSS反射、无线电掩星和散射载荷,主要关注当前正在使用的全球导航卫星系统(GNSS)信号应用,在L波段对地遥感方面聚焦研究气候变化。首要任务目标是确定海表高度和海表均方斜率(与海面粗糙度和风速有关),这些地球物理参数可通过反射GNSS信号获得(GNSS反射测量,GNSS-R)。 第二任务目标包括利用折射GNSS信号(无线电掩星,GNSS-RO)探测大气层/电离层,利用GNSS-R进行陆地表面遥感等。
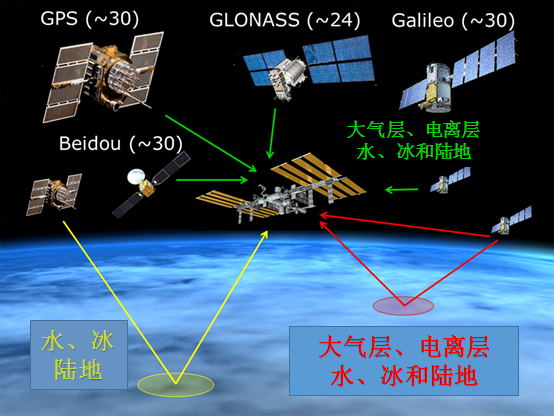
1 引言 2011年7月,欧洲航天局ESA载人指挥部与地球观测计划理事会发布公告,征集国际空间站全球气候变化科学实验, 收到237位科学小组的25封意向书。 经过对建议书、科学和技术评估同行评议,对GEROS-ISS(以下简称GEROS)提案进行A阶段可行性研究。 GEROS提案团队由欧洲国家12名科学家和工程师组成(德国、丹麦、西班牙、瑞士)和一位美国科学家。GEROS是一个新的ISS创新实验,主要致力于利用GNSS卫星L波段反射信号,测量与气候变化相关的海平面关键参数。第二任务目标包括利用GNSS无线电掩星RO(radio occultation)技术观测全球大气层和电离层,利用GNSS反射信号监测陆表参数(图1)。
图1 国际空间站上安装的GEROS实验示意图 黄线表示水、冰和地表监测(视场1)的反射测量; 红线表示水、冰和地表的相干反射测量(视场2)和大气/电离层探测的GNSS无线电掩星(视场3); 绿线表示ISS上方天线接收的GNSS信号,用于对GEROS载荷进行精密定轨(POD)以及电离层三维监测
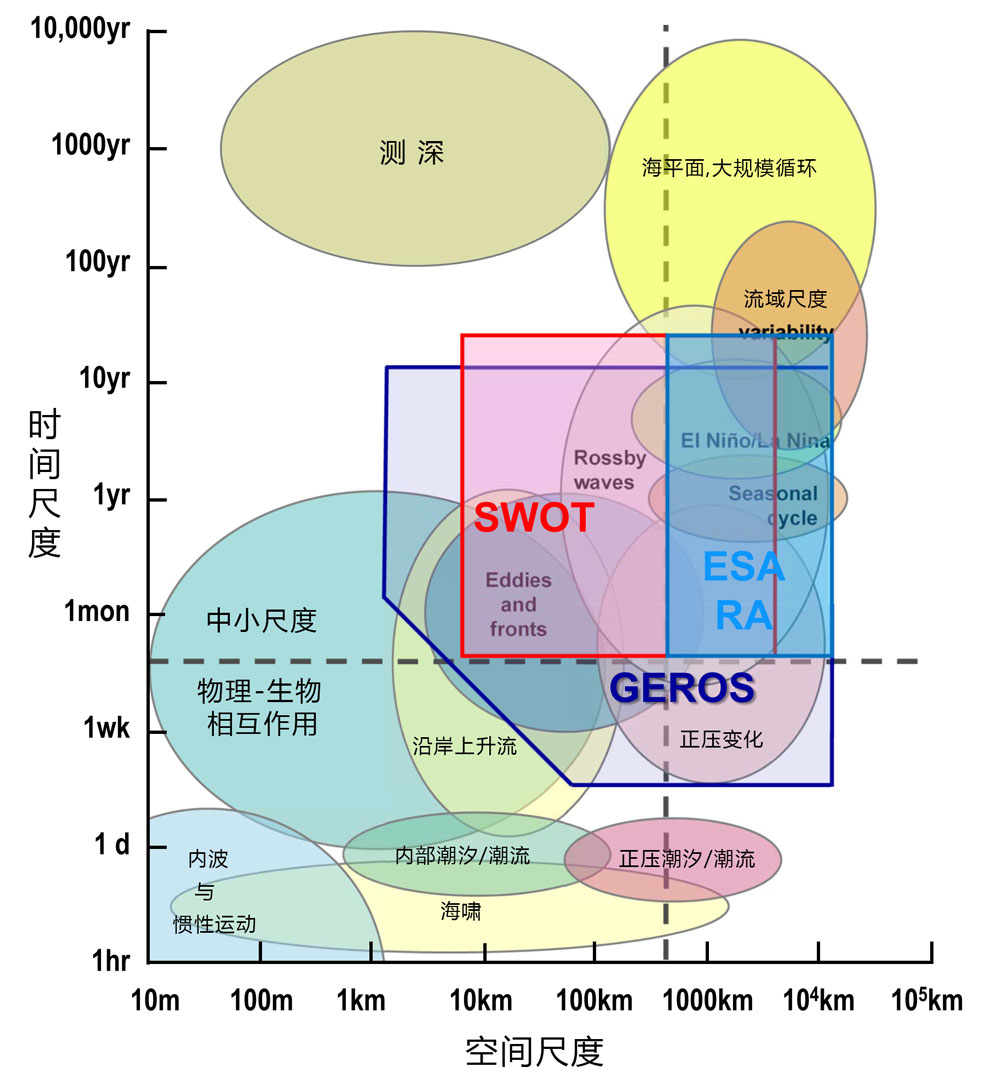
作为对其他地球观测卫星的补充,GEROS将开辟对欧洲伽利略系统GNSS遥测信号的研究,与只有GPS的测量相比,将能提高精度和地球物理观测的时空分辨率。 另一个目标是增加俄罗斯GLONASS、中国北斗和日本QZSS导航卫星系统的信号利用。 GEROS将有助于地球系统主要构成及与气候相关的长期观测:海洋/水圈、大气/电离层、固体地球/陆地,甚至冰冻圈/雪(由于ISS轨道特点,主要限于喜马拉雅山和安第斯山脉的冰川区域),与已经建立的地球观测卫星相比,具有创新性和互补性。GEROS数据可以面向ESA地球观测战略,进行气候变化相关的科学研究。 GEROS将主要对中小尺度或更长海洋变化进行中低纬观测(见图 2);至少两年重点研究(越长越好,取决于暴露载荷的空间分配)沿海地区、表面洋流、表面风场、波高和垂直大气温度、水蒸汽和电子密度结构等。GEROS-RO观测将有助于更好地了解气候系统,例如海洋正压变化、Rossby波大尺度结构、涡流系统、以及锋面和沿海地区上升流。GEROS利用ISS基础设施空间比较大的优势,由于在天线尺寸和电力供应等方面受到的限制较小,ISS对于未来先进的GNSS-R和GNSS-RO技术发展是一个独一无二的平台。这方面的应用前景是未来用于海啸探测和早期预警的多星卫星星座。由于这些创新的GNSS遥感方法应用,GEROS也得到了ESA技术和质量管理部TEC的支持。 GEROS将为其他即将进行的卫星任务提供传感器校正/验证机会,包括欧洲双平台海洋遥感任务Sentinel-3(包括Sentinel-3A-已于2016年2月16日发射,Sentinel-3B将于2017年发射,持续7-12年)、美欧SWOT (Surface Water Ocean Topography,预计2020年发射,持续三年)和美国/中国台湾12颗卫星星座FORMOSAT-7/COSMIC-II(Constellation Observing System for Meteorology, Ionosphere and Climate)(初步计划2017 年发射六颗低倾角轨道卫星,持续至少 5 年)。从GEROS获取的GNSS遥感数据也将补充美国飓风全球导航卫星系统CYGNSS (CYclone Global Navigation Satellite System)的创新散射测量,后者入选了NASA地球系统科学开拓计划。CYGNSS (8个小卫星)将研究海洋表面性质、 潮湿大气热力学、 热带气旋辐射和对流动态。
图2.海洋观测各种相关过程信号 时间尺度为1小时到数千年,空间尺度从10到数万公里,该图说明这些空间和时间尺度过程和现象,可以用GEROS进行互补研究,并与NASA SWOT计划任务和ESA与NASA的雷达测高任务不同。
2 GEROS 任务 A 任务目标 GEROS的主要任务目标如下所述: 1)使用反射的GNSS信号测量和绘制海洋表面高度SSH(Sea Surface Height),进行方法演示、误差和分辨率确定、以及与天基天底指向高度计结果的比较/协同,这个过程包括对GEROS载荷的精密定轨POD(Precise Orbit Determination)。 2)监测海面均方斜率MSS(Mean Square Slope),与海洋粗糙度、风速和方向有关,使用GNSS星载接收机可进行方法测试,确定误差和分辨率。另外,二维MSS(定向MSS,与风速有关)更符合实际。 GEROS将是第一个具有中尺度海洋测高能力的GNSS-R任务,这也是最初任务提案的主意想法。对海洋中尺度涡流进行采样的能力对于任何一种新测高任务都具有驱动作用。由观测可知,海洋环流监测及其改进将依赖于对开放海域和沿海地区不到几天内进行的海表速度(~10~100公里或更大)复杂结构测绘。所以,与Sentinel-3(ESA)和SWOT(CNES / NASA)计划任务相比,需要扩大时空尺度,这将由其他任务解决。GNSS-R全球观测的目标之一是将传统高度计数据和GNSS-R测量密度相结合,从数量上填补100公里“高度时域空白”。已有表明这些附加观测在解决中尺度采样能力方面是合适的,尽管比不上测高仪最高水平。需要特别说明的是,GNSS-R附加值取决于解决问题的能力,也即通过跟踪中尺度海洋特征来解决区域或全球信号的能力。这可以很好地弥补观测亚中尺度结构的能力,也应在未来高分辨率测高任务中使用Doppler或宽幅测量来解决。 第二任务目标提升了GEROS数据的科学价值,但并不推动仪器发展,包括: 1)进一步探索GNSS-RO数据潜力(大气弯曲角度竖直剖面、折射率、温度、压力、湿度和电子密度),特别是热带地区,探测大气温度和气候相关参数的变化(例如对流层顶高度),提供附加信息用于分析GEROS反射测量数据; 2)评估GNSS陆地应用散射测量的潜力,特别是开发土壤水分、植被生物量和中纬地区雪/冰属性等数据产品,以更好了解人为因素的气候变化。 B 任务状态 GEROS由ESA发起,通过复杂审查过程选出,审查结果和决议已于2012年底正式公布。海洋学、大地测量学、大气和GNSS等领域公认专家的跨学科和国际科学咨询组SAG(Science Advisory Group)于2013年6月开始运作,以便在具体细节上为GEROS任务做准备。SAG由提议的GEROS团队关键成员和其他ESA提名专家组成,与ESA GEROS团队有密切合作。 SAG的首要任务,ESA拟定GEROS任务需求初稿,已在2013年11月中旬完成,2013年12月提出系统要求的第一个准则。GEROS-SAG与GNSS-R相关任务密切合作,例如CYGNSS(2016年12月15日发射)、TechDemoSat-1(TDS-1,在2014年7月8日发射)、3Cat-2(2016年8月15日发射)和E-GEM项目(欧洲GNSS-R环境监测)。 两位美国外部专家支持GEROS-SAG工作,表现出NASA和国际上对GEROS的科学兴趣。 为执行GEROS任务,两个竞争性的A阶段研究于2014年11月开始,并于2016年4月结束,由ADS (Airbus Defense and Space,马德里,西班牙) 和TAS(Thales Alenia Space,罗马,意大利)领导。 与此并行的科学研究GARCA(GNSS-R Assessment of Requirements and Consolidation of Retrieval Algorithms, GNSS -R 需求评估与反演算法集成),也由欧空局资助,于2014 年 11 月开始,2016 年 10 月完成。GARCA研究团队由17名科学家、GNSS-R专家和海洋学家组成,来自6个欧洲国家(法国、德国、挪威、葡萄牙、西班牙、英国)的7个机构。 这个团队得到了来自丹麦、德国、意大利、瑞典、瑞士和美国的外部专家的支持。GARCA主要目标是提供科学需求的评估和整合,星载GNRSS-R 实验反演算法的整合,聚焦于GEROS概念及其初级和次级数据产品(SSH和海表粗糙度)。 GARCA主要工作是为GEROS测量开发端对端模拟器(GEROS-SIM),以及对预期地球物理数据产品的评估。 其他工作也相应开展,目的是通过观测系统进行模拟实验OSSE(Observing-System Simulation Experiments),来评估GEROS测量中海洋学的重要性。 外部专家支持GARCA项目,参与工作测试研发,并发起跨学科GEROS用户团体的可持续发展。 GARCA科学成果由国际项目团队公布,并有六份技术说明,这些文件详细描述了GEROS-SIM及其测试和性能。 欧空局2015年5月在Baltic海发起两次飞行活动,距离Helsinki的Finish海岸线不远,为 GNSS-R测高方法预测GEROS进行了概念验证。 2016年3月份工业阶段A研究和2016年10月GARCA研究的终结将以ESA关于GEROSB阶段延续性的决定结束。按照ISS战略计划,一旦成功完成准备并提供适当资金,GEROS预计在2019年9月至2020年3月部署。计划利用Space-X的Dragon C3-1发射器,进行一个短期测试后,在肯尼迪航天中心(KSC)发射。预期最短寿命为1年,可能延长至5年。表1总结了选定任务的参数。
表1 GEROS:2016年9月选定任务参数
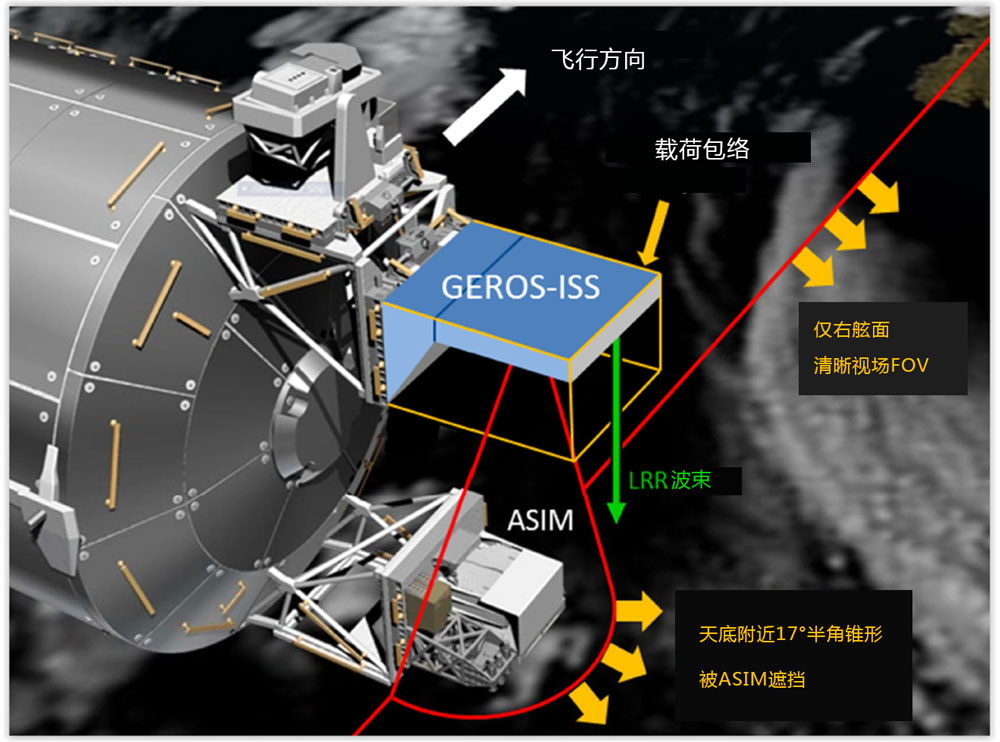
3 技术概念 A.运行概念 GEROS将被整合到哥伦布外部暴露载荷适配器CEPA(Columbus External Payload Adapter)上,反过来附加到Space-X非加压箱体的主动飞行可拆除附件机构(Active Flight Releasable Attached Mechanism)。在肯尼迪航天中心KSC,该箱体将被装配到龙飞船,并由猎鹰 9号 助推器发射至太空。在运往国际空间站期间,GEROS载荷将暴露在空间环境中,龙飞船接近ISS时将被空间站远程机械手系统SSRMS(Space Station Remote Manipulator System)捕获进行对接。专用灵巧机械手SPDM(Special Purpose Dexterous Manipulator)将从龙飞船的行李箱中取出GEROS并移到右舷架顶部,在哥伦布外部暴露载荷设施CEPF(Columbus External Payload Facility )的X方向位置(EPF-SOX)进行安装,GEROS载荷将执行标准操作。任务结束时,GEROS将按相反顺序运回到另一个龙飞船箱体中,进行破坏性再入。 运行期间,哥伦布舱将为GEROS提供电力,并通过多功能计算机和通信系统,提供一个遥测、跟踪、控制和科学数据地面往返传输的数据链路。 ISS用户支持和操作中心USOC(User Support Operation Center)中的一个将被作为连接科学支持中心SSC(Science Support Center )的接口节点,负责载荷指令和数据处理(包括1级和2级)。 GEROS载荷将按照SSC提前准备的周计划运行。 欧洲太空天文中心ESAC(European Space Astronomy Center)已被提议作为SSC,将主导伽利略Galileo科学利用数据。 B.GEROS载荷 GEROS的关键载荷是波束成型天线GAB(GEROS Antenna Beamformer),有4π球面视场(FoV),能够接收任何方向传来的GNSS信号。然而,一半空间被哥伦布舱的结构遮挡,只有右舷方位角介于0◦(速度)和180◦(反速度)可行。天底点角度范围为0◦(最低点)到90◦(天线地平线),在低于17◦视场被大气-空间交互监视器ASIM(Atmosphere-Space Interactions Monitor)遮挡,CEPF位置上的载荷正好位于GEROS下方(见图3)。
图3 GEROS部属于哥伦布舱外部暴露设施,视场角受限
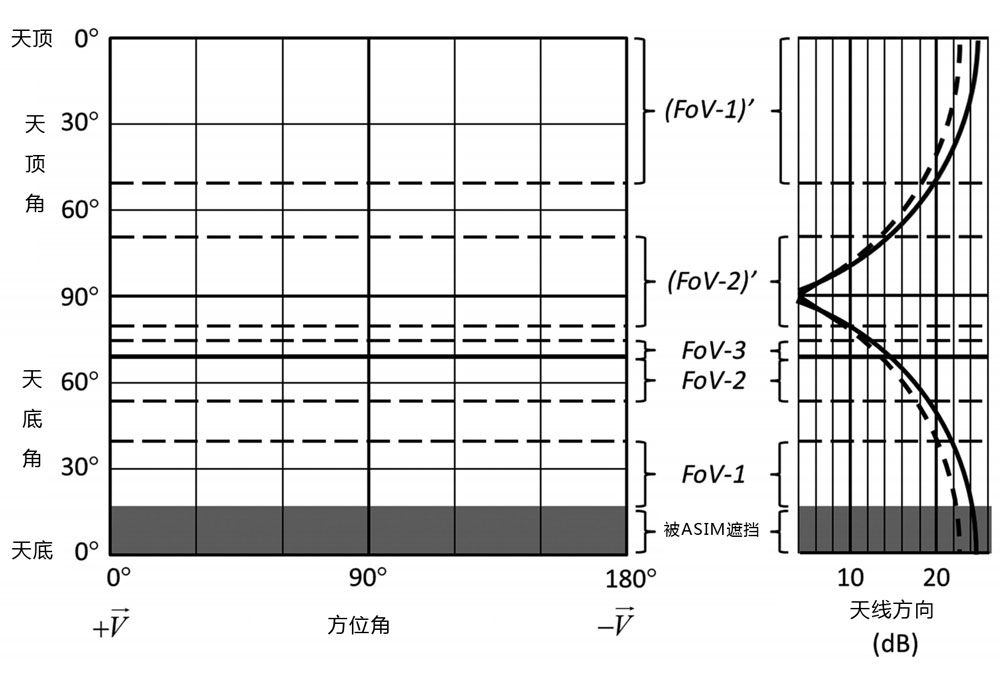
忽略其他不重要的遮挡,如那些由主桁架和旋转太阳能翼产生的,图4显示了GAB可获得的视场。 三个不同部件在GEROS 视场内是有区别的,包括用于高度测量和散射测量的近天底点反射(视场-1,FoV-1)、用于高度测量的掠反射(视场-2,FoV-2)和大气/电离层探测的RO(视场-3,FoV-3)。 视场-1包括从17◦到41◦天底角,对应于20◦到50◦之间天顶角的直接信号。 视场-2天底角范围在54◦和69◦之间,对应于天顶角68◦和天底角80°之间的直接信号,GNSS卫星在天线视野产生天底角65°的镜面反射点。最后,视场-3包括第一个250公里的大气层,天底角介于69°(地球表面)和77°之间。
图 4. GEROS载荷视场(左)和天线指向(右) 视场1(FoV-1) 对应接近天底点反射、视场2(FoV-2)对应掠反射、视场3(FoV-3)对应无线电掩星、影射FoV-1和FoV-2对应各自直接信号。
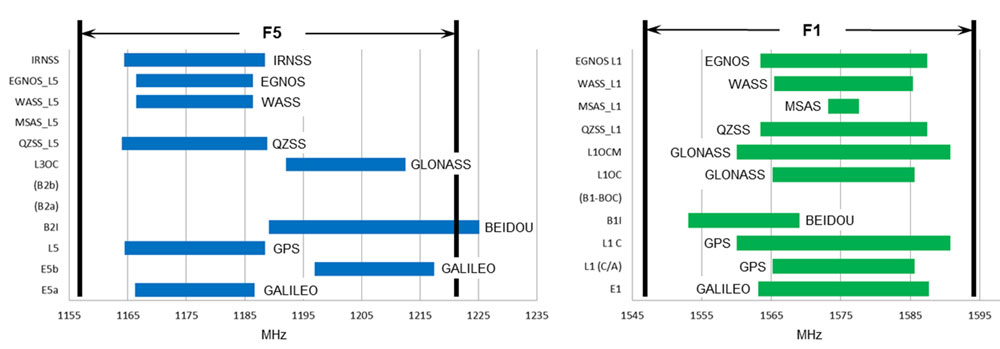
图4右侧表示天线方向,为方位角平均值,频段F1(1547.1-1594.5MHz,中心频率为1570.8MHz,图中为实线)和F5(1157.4-1221.3 MHz,中心频率为1189.3 MHz,图中为虚线)作为天顶角和天底角的函数。 天顶(和天底点)的天线方向在F1频段为24.5 dB,在F5频段为22.5dB,在视场-1(FoV-1)边缘下降约3-4dB。 视场-2(FoV-2)方向从3变化到19 dB,主要取决于镜面反射点的位置,视场-3(FoV-3)方向在14(指向对流层)和10 dB之间(大气层顶部)。 考虑2020-2024年进入轨道,并具有可操作性的GNSS卫星设置时,已进行的可视分析得出GEROS载荷天线束的最佳数量是4,因为这是近天底点、掠射和RO事件一起的数量,大部分时间几乎同时发生。 GEROS载荷可以并行跟踪三个符合右旋圆偏振RHCP(right-handed circular polarization)的直接信号,以及F1频带对应的三个近天底点RHCP和LHCP(left-handed circular polarization)的反射信号。 同样功能F5处也可用,但仅在近天底反射信号LHCP极化时适用。 另外可以用第四个双频波束组来观测第四个近天底反射、掠反射或RO事件。 GEROS载荷还提供额外配置进行降水观测,其中,第四个双频波束用于接收双极化掩星。 在F1的GEROS载荷带宽为47 MHz,F5的带宽则为64 MHz。设置两个接收频带F1和F5是为使观测到的GNSS信号数量最大化。如图5所示,GEROS可以实施GNSS-R和RO,有来自不同GNSS系统的各种信号,包括GPS、Galileo、GLONASS、北斗、QZSS,及其扩充系统MSAS、WAAS、EGNOS和IRNSS。
图5 GEROS载荷可以处理的GNSS信号,F1和F5两个频段内GNSS反射测量和无线电掩星
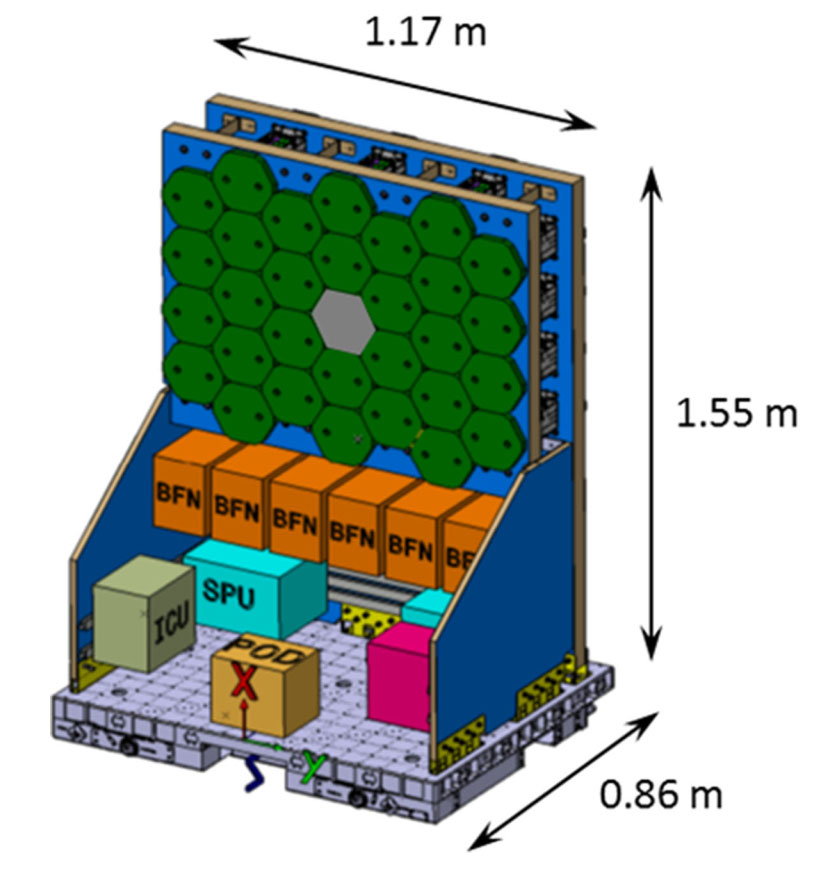
图 6 安装在哥伦布舱CEPF(右)上面的GEROS-ISS载荷(左)
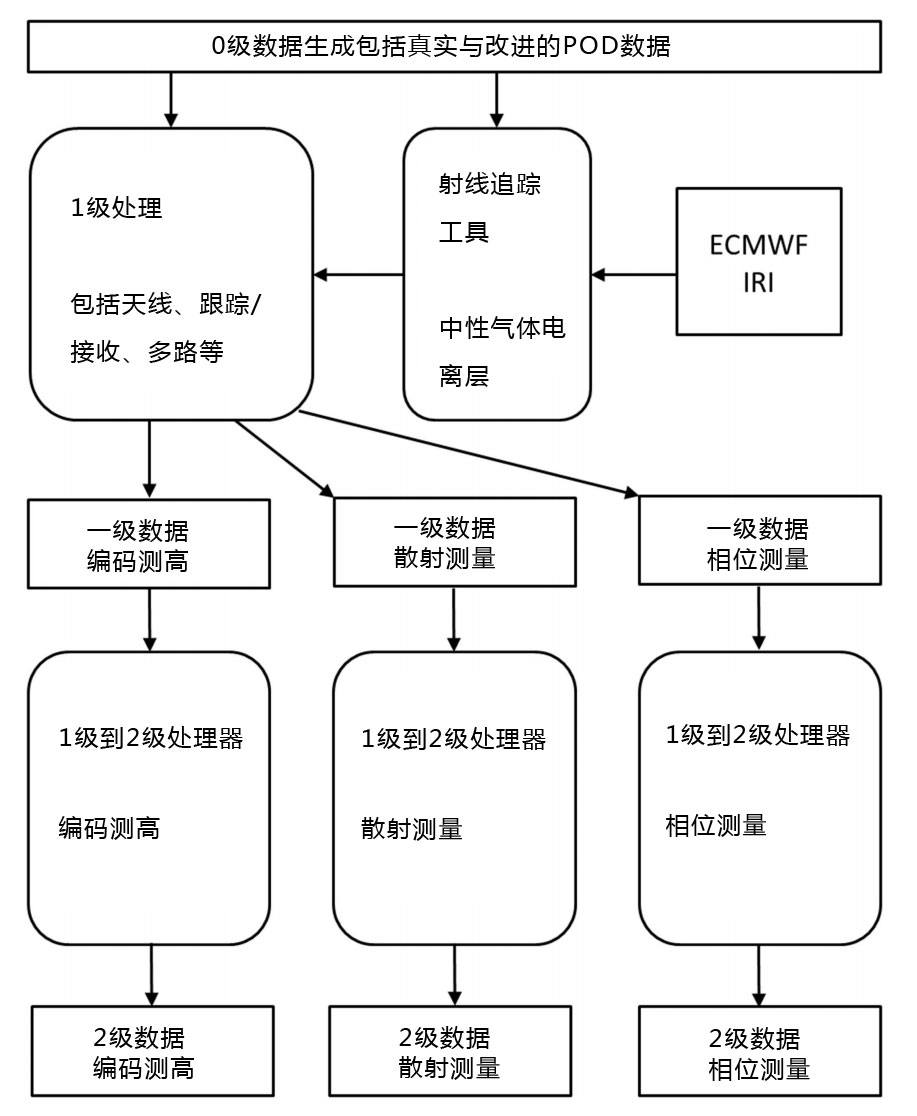
如图6所示,GEROS载荷整体尺寸是1.55米 ×1.17米×0.86米,最突出特点是天线(图8中绿色阵列),双面GAB每边有30个元素(天顶和天底)。一个额外元素在天顶阵列中心位置,仅适用于POD。类似地,一个激光回射器放置在中心天底位置,进行POD验证(图8中灰色元件)。天线两面间是校准器和低噪声放大器单元。这些单元执行路由关键功能,通过相同接收链的直接或反射信号,作为交换技术。在这方面,GEROS载荷进行延迟和振幅自校准(天线模式除外)。 图6所示的GEROS载荷附加单元是仪器控制单元ICU(Instrument Control Unit,浅绿色)、电源供电单元PSU(Power Supply Unit,红色)和POD GNSS接收器(POD,黄色)。GEROS载荷安装在CEPA托盘上,为哥伦布舱提供了所有必要接口。GEROS载荷总质量为376公斤(20%余量),395瓦(20%余量),2 GB大容量存储(80%存储容量)和1.2 Mbps输出速率。 C.仪器误差估算 GEROS载荷与PARIS IoD非常相似。在PARIS IoD的A阶段期间,进行行了仪器优化和误差预估,包括每个频段、热和斑点噪声的影响、相干和非相干平均、以及由于天线损耗带来的信噪比(SNR)衰减、波束形成器的振幅和相位误差、天线相位中心误差、接收器噪声系数、频率响应失配(带宽和群延迟)、量化效率、延迟和多普勒刷新率再跟踪更新,在一个特别端到端模拟器的帮助下,该模拟器从被动先进单元PAU(Passive Advanced Unit )端至端模拟器演化而来。随后通过计算CRB(Cramer-Rao bound)改善误差预算。 4 GEROS模拟 GARCA研究的关键部分之一是实施端到端模拟,涵盖从详细的仪器方面到更高级的数据产品,可用于评估当前或近期将来地球观测系统中的GEROS海洋影响,包括GNSS-R可观测量(L1级产品)模拟,这是一套生成地球物理产品(L2级产品)的提取算法,及其时间和地理位置、噪声和系统效应。 GEROS-SIM由核心模块组成,通过详细的几何和仪器参数生成GNSS-R可观测值,另外还有一系列具有完善输入/输出接口的其他模块,以生成所有其他步骤。如果给出正确的输入数据格式,每个模块独立于其他模块运行。这种方法的优点是:如果以正确格式提供数据,使用L1到L2不同模块对真实实验数据进行算法反演。因此,GARCA项目中开发的模块已经提供了潜在GEROS处理器的初始版本,用于生成地球物理1级和2级数据产品,服务于主要任务目标高度测量(编码和相位)和散射测量。图7是处理器示意图。 图7 GEROS-SIM示意图
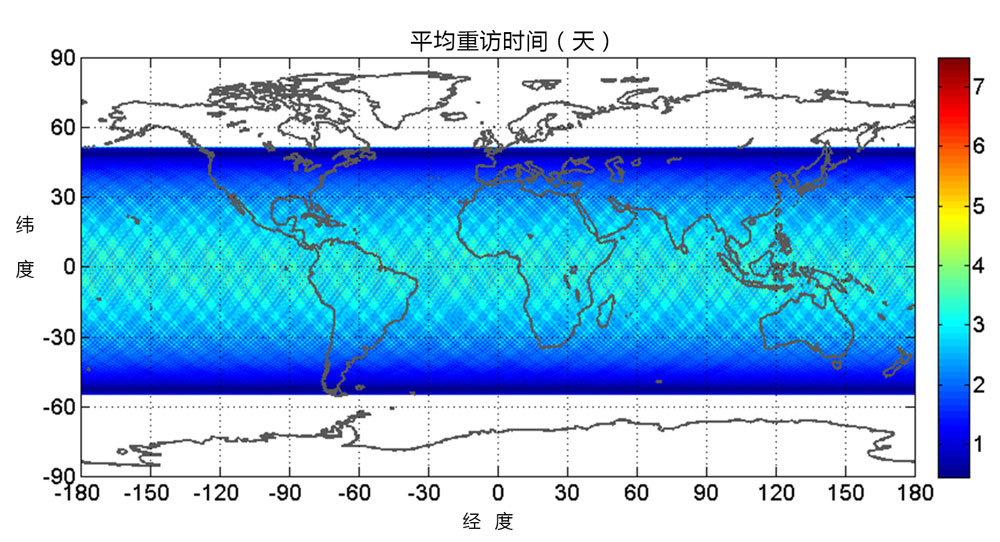
A. GEROS观测覆盖范围模拟 根据GEROS任务目标定义GEROS-ISS观测模式。作为要求,载荷应能跟踪入射角达80°的波束,用于上下视天线阵列。GEROS模拟器进行镜面点定位,包括ESA地球观测客户装备项目CFI(Customer Furnished Items)软件,进行准确定时、坐标转换、天线指向和反射计算。本研究模拟使用10秒采样,周期30天。GEROS-SIM计算预定义的GNSS系统如下:
1)北斗系统包括35颗卫星(5颗在地球同步轨道GEO,3颗在倾斜地球同步轨道IGSO,27颗在中轨MEO); 2)Galileo系统包括30颗MEO卫星(其中24颗在运行,6颗备用); 3)GLONASS包括24颗运行的MEO卫星; 4)GPS系统有31颗MEO卫星(24颗为核心卫星,7颗额外卫星); 5)QZSS系统有3颗卫星(1颗在IGSO,2颗在GEO)。 ISS轨道高度为400公里,周期为90分钟,下图显示了GEROS测量结果分布和FoV-1平均回访时间。 图8 ISS观测覆盖与近天底观测的平均重访时间,FoV-1 由于载荷技术限制,观测值受到GAB跟踪波束数量的限制。对于近天底视场FoV-1,超过80%时间四个波束可视,其中50%测量值低于33°入射角。对于FoV-2(掠角),在GARCA科学评估期间,系统要求更新允许使用上视天线,可以同时观测的波束数量大大改善,目前在多于97.7%的时间内可看到4个波束。仅大约24%的波束对来自下视天线,而76%使用上视天线追踪直接信号和使用下视天线追踪反射信号的轨迹。 B. L1级处理 该模块包括生成GEROS-SIM仪器测量(L0)和相应L1数据的算法。输入观测几何、海面状态和仪器硬件规格,可计算观测DDM /Waveforms。为了高效实施,已建立GNSS-R模拟器,PAU / PARIS E2E模拟器(P2EPS)已通过改装适应特定的GEROS规范,被大量重复利用,这些规范包括天线阵列波束形成、接收机效应、跟踪和噪声特性等。
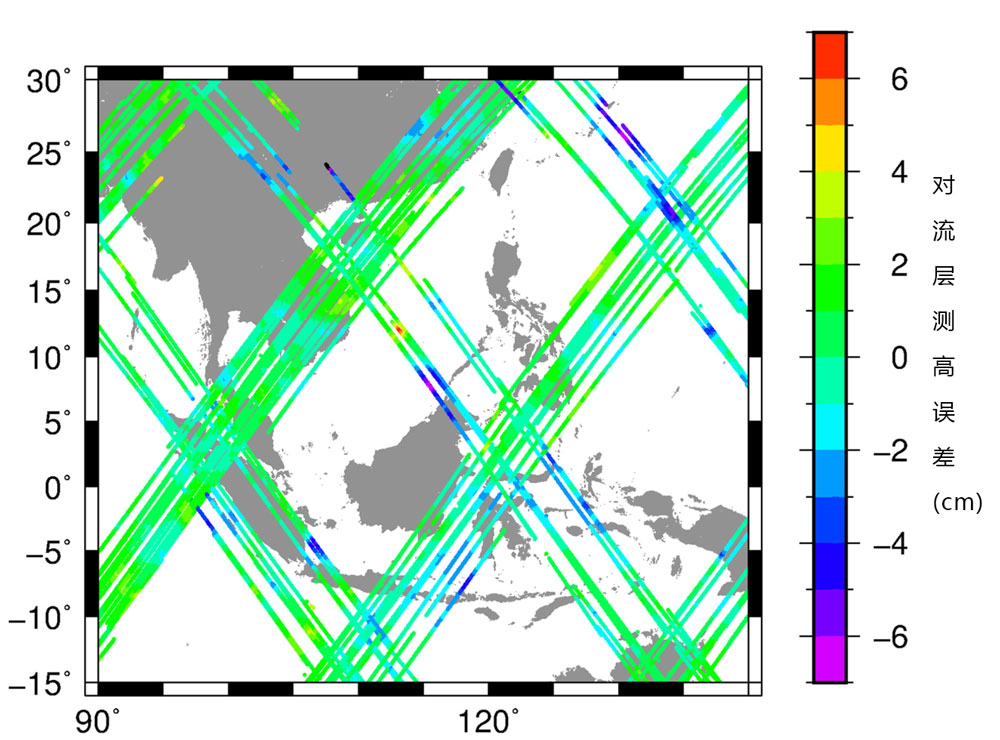
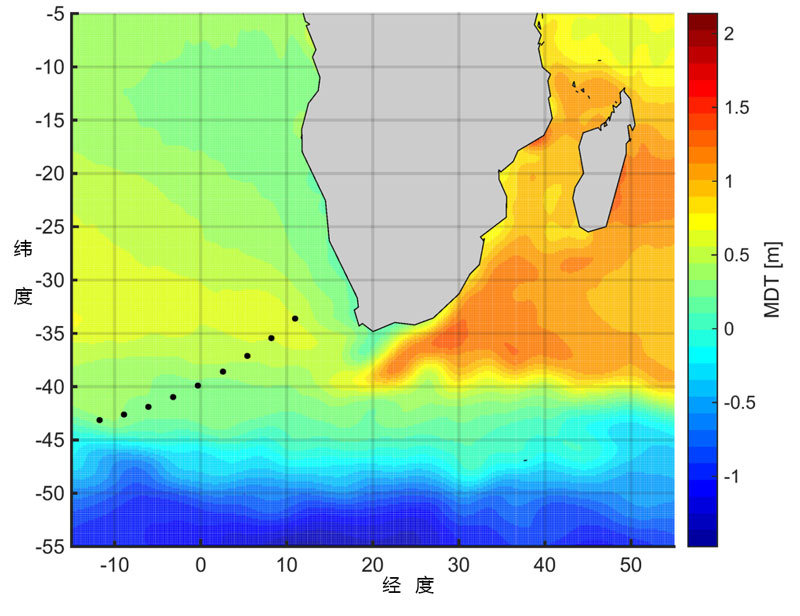
GEROS与其他航天GNSS-R仪器(例如TDS-1和CYGNSS)的一个特殊区别是天线阵列波束形成能力。为了增加SNR,GEROS能够将天线波束指向镜面反射点。GEROS-SIM还具有分析指向误差影响的功能。 C. L1级到L2级处理 生成主要GEROS地球物理数据产品的三个处理模块:编码测高(Code Altimetry)、相位测高(Phase Altimetry)、散射测量(Scatterometry)等。SSHs的分析使用编码和相位测高法获得,两种方式分别进行,并由IEEC和GFZ开发。表面粗糙度和测风由NOC开发的散射测量处理模块生成。图9描述了对OSSE产生的高程反演对流层误差的一个例子。图10考虑了Agulhas海流区域的模拟反射事件,作为天基记录的一个例子。TDS-1(TechDemoSat-1, 2014年7月8日发射)配置的GEROS-SIM参数如表2 所示。GEROS预期数据产品如表3所示。
图9 高程误差实例
图10 1分钟间隔的E03事件(黑点)地面轨迹
表2 TDS-1配置的GEROS-SIM参数
表3 GEROS预期数据产品
D.GEROS精密定轨 GEROS实验的成功取决于在地球固定参考系中精确定位GNSS-R天线相位中心的能力。为此,POD利用专用天顶天线采集的GNSS载波相位跟踪数据,这也是GEROS实验的关键任务。许多卫星任务具有严格的POD精度要求,通常要求(1-D)位置RMS误差为几厘米,例如重力任务(如GOCE)和测高任务(如Jason-2),尤其径向分量对于测高任务获得高质量数据至关重要。根据CHAllenging 微小卫星载荷(CHAllenging Minisatellite Payload)数据初步验证,GEROS的POD测量也可以用于三维(3-D)上部电离层监测。基于双频GPS数据的Offline约化动力学POD已经演变成成熟确定的技术,只要通过额外测量精确了解惯性空间在轨GNSS接收机天线的姿态运动(例如,星型相机读数和/或使用附加GNSS天线),便可以提供厘米级精度。如果同时连续跟踪GPS卫星的数量足够,在动态模式下,能获得稍差精度。而较小卫星质心位置的约化动力学精密定轨原则上是简单的,而大型平台如国际空间站则有大挑战。POD天线相位中心质心位置的不准确,平台结构变形和振动了解不足(例如由于地球阴影效应,以及对于天顶POD天线,信号遮挡效应也会降低同时跟踪卫星的数量),会带来显著误差。即使使用双频GNSS数据,依赖动态POD实现国际空间站的亚分米轨道精度也将是一个挑战。由于这些困难,GEROS实验计划进行POD天线相位中心位置的动态测定。为此,POD天线嵌入作为GEROS天线本身的一部分,减少对国际空间站辅助姿态的需求。上下视天线之间的典型间隔为10-20厘米,国际空间站约3°~4°的姿态不确定性在最坏情况下只能转化为约0.3 mm的垂直影响。 E.GNSS无线电掩星与GEROS GEROS提案中已确定的另一目标是基于GNSS的RO,精确探测中性大气和电离层。一些任务的GNSS-RO数据目前已经随时可用,例如FORMOSAT-3 / COSMIC、Metop-A / B、GRACE、TerraSAR-X和几个具有GNSS-RO的新任务(例如COSMIC-2、第二代EUMETSAT Polar System、EPS-SG)。因此,与基于GNSS的海洋遥感相比,GEROS获取RO数据的需求不太引人注目,被认为是低优先级任务目标。 GEROS内有几个支持RO测量的新特性。包括: (1)RO技术创新:与极轨/近极轨RO任务相比,国际空间站倾角在热带和中纬地区可以有更好的数据覆盖和更强的RO信号。 GEROS可以为RO初步应用Galileo和GLONASS信号,并初步应用极化掩星概念,监测强降水事件,同时并行继续西班牙PAZ卫星测量。
(2)对GNSS-R方法有强互补性,对于海面和冰面地形高度测量的相干反射测量(主要任务目标的一部分)。
(3)提供有用的额外大气(干湿对流层)和电离层延迟信息,与GEROS GNSS-R测量部分搭配,并与国际空间站海面测高反射计测量的分析和校正相关。
(4)一种新干涉测量RO技术的应用。这种方法通过现场接收GNSS信号的记录片段代替在轨生成的代码副本。设计GEROS载荷具有最佳测高性能,可以相当简单的方式实现这种RO处理。
F.GEROS预期数据产品 GEROS任务具有经典的0级至2级数据产品,二级产品将成为地球物理用户的主要产品,其他产品和更高级产品(3级)预计将由对GEROS感兴趣的科学机构和国家组织获得。 GEROS数据产品将通过一个或多个专门的GEROS科学数据处理和归档中心为国际科学用户提供和归档数据。将通过若干途径形成一个广泛的科学和跨学科GEROS用户群,如定期数据用户研讨会、在国际领先地球科学期刊发表联合科学研究、以及共同收购第三方资助项目,支持对GEROS数据的科学利用。 GEROS产品可以对作业天气和海洋预报系统全球数据库做出贡献,前提条件是数据产品近实时提供(例如测量气象数据后3小时),需要额外的专门任务基础设施。 由于GEROS是一个实验和示范任务,所以虽然目前任务状态下这样的全面运行提供数据产品还不预见,但是计划进行专门实验展示提供近实时产品。 V. 科学研究 GEROS任务准备和SAG工作中有一部分是专门的科学研究活动。 A. Baltic海飞行 该阶段GEROS任务建议的干涉GNSS-R方法在地面实验和机载实验中得到了实验证明。这些技术可行性和测高性能都在活动中进行了研究,但是使用简单的单光束高增益天线,不可能测试概念天气能力(宽幅)。鉴于iGNSS-R技术不能通过代码解调技术分离信号源,必须通过来自于不同和同时的天线波束区分天线印迹来完成。因此,接收系统必须同时具备多波束合成和指向的能力。这种iGNSS-R仪器并不存在,所以为了测试不得不开发这种设备。PARIS干涉测量接收器SPIR(PARIS Interferometric Receiver)是一种非常高速率的数据记录器,包括两个天线阵列,一个仰视,另一个俯视,每个八个元件。十六个天线元件中每一个收集的信号被下变频,并且1bit量化的同相和正交分量在80MHz采样。这产生了几个小时持续的2.5Gbit / s(320MBytes / s)数据流,是典型的机载实验长度。每个天线元件信号利用公共时钟同步,并由商用GNSS接收器芯片进行时间标记。这种记录方法能够从尽可能多的同时可见源(高程范围来自单天线元件的天线方向,每个大约7 dB方向性)测试任何处理策略(iGNSS-R等)。
按照与2011年iGNSS-R演示相似的轨道, 2015年5月在波罗的海进行了机载活动。尽管原型仪器产生了RF干扰,但数据分析已可确认(并稍微改善)2011年实验中简单单光束仪器获得的测高精度。
B.观测系统仿真实验 OSSE被广泛用于评估未来观测的潜在影响,特别新卫星传感器建模和预测环境现象的影响。OSSE中“真实”状态是由所谓的“自然运行”或“自然模拟”使用全面而现实的模型产生的。通过目标观测系统的采样特征,可以从“自然运行”(或特定测量的反演算法)直接获得综合“观测”,相应的测量误差被模拟并添加到综合观测中。使用不同的初始条件和/或模型强制/参数进行不同的模型运行(“控制运行”),以便模型状态与“自然运行”不同。将综合观测同化到控制运行中,通过评估同化运行再现真实状态的程度,来检查综合观测的影响。研究人员进行了几次OSSE,研究GEROS数据改善海洋预报能力的潜力,其中,GFZ、JPL和NERSC进行了三项研究。 C.GNSS-R土地应用 由于大气衰减降低,特别是良好的穿透能力,导航系统采用的低频段(例如L波段)适合陆地应用,如土壤水分和植被生物量监测。
欧空局ESA“Living Planet”计划将通过全球尺度土壤水分测绘更全面了解水循环,通过将土壤水分观测同化到模型中来改善天气和洪水预报。水分动力影响植被的结构和生长,反过来又影响土壤-植被-大气系统,因此植被将水循环与碳循环关联起来。森林可以储存大量的二氧化碳,因此参与到碳循环中,而这会影响温室效应,以及全球和当地的气候变化。理论和实验均研究了GNSS-R土地应用的潜力,例如在地面上利用直接和反射信号的干涉图导出土壤湿度和雪参数。虽然已证明GNSS-R信号对目标地面参数的敏感性,但还没有证明从卫星以操作方式进行的可行性。GNSS-R陆地应用并不包含在原始GEROS提案中,但被GEROS-SAG认为是一个额外和重要的任务目标。在这方面,GEROS海洋主要应用的许多功能也可以用于陆地。特别是圆偏振高度灵活的天线操作,应提供用于陆地参数反演的独立信息,并且其高增益将能感应宽动态范围信号,特别是在具有高衰减的较密植被目标(例如森林)。
欧空局ESA资助了一些探索性项目来研究这些问题。在“导航信号土地监测”项目中,由Starlab Barcelona开发的GNSS-R接收机安装在吊机上。可以覆盖整个作物生长季节,并且有较高的田间水分和粗糙度变化。电磁模型作为一个独特的软件包(即SAVERS),能够预测相干和非相干散射机制对裸露和植被目标采集波形和DDM的贡献。利用“生物量监测GNSS反射测量分析”(GNSS Reflectometry Analysis for Biomass Monitoring)机载实验数据,进一步验证了模拟器的功能。主要发现是对土壤水分和粗糙度表面等效反射率敏感度的量化,其组合效应可以通过偏振观测来分离。此外,SAVERS正确预测了土壤表面反射相干信号观测的衰减,与森林地上生物量直接相关。最后,将GEROS反射计准镜面观测与过境相同区域雷达系统(例如,Sentinel 1A或1B)的反向散射数据相结合,可以开辟新的前景。例如,使用这种多状态方法,随着土壤粗糙度镜面反射率的降低和反向散射的增加,有助于区分土壤湿度与粗糙度变化。 GNSS-R应用也被其它实验采用。BEXUS实验显示出不可忽视的相干散射成分、功率几乎与平台高度恒定、多峰散射行为等,这些显示了土壤表面和植被不同的散射机制,在不同类型表面有一个从 -2下降到-16 dB 的极化率范围。机载实验证明了对土壤湿度和水分的敏感性,以及对植被和表面坡度的敏感性(见图11)。地形和局部入射角变化需要纠正,水/植被指数与GNSS-R反射率和地表温度的综合利用显著改进了土壤水分估算。 图11 LARGO仪器采集的同步GNSS-R反射地面轨迹(左),地形和水体散射系数变化(右) 颜色表示前向散射系数(蓝:高,红:低),海洋上由于海洋状态不同有所变化,陆地上低/高散射(红/蓝)与低/高土壤水分(干/湿)有关。
VI. 总结与展望 本文概述了ESA国际空间站GEROS实验,寻求利用GNSS信号的机会,进行海洋、大气和土地覆盖遥感。GEROS代表了第一个专门用于评估GNSS-R可利用性的实验,航天GNSS-R在全天候条件下探测和绘制中尺度(10-100公里或更大尺度)的海表高度。GEROS测量SSH结果将补充传统雷达高度计多卫星星座的SSH数据,从而以接近10公里的更精细空间分辨率更好地监测海洋中尺度变化,这是目前天底点高度计无法实现的。GEROS数据集重大进展将是确定GNSS-R的价值,作为涡流及其变化长期可持续观测的手段。GEROS不仅将演示GNSS-R海面高度测量并确认其性能,还可以整合所需技术,为成熟科学提供数据并开发数据处理技术。为此,GEROS将利用独特的国际空间站平台生成前所未有的数据集,以推动基于GNSS的地球观测技术,进行与气候相关的测量,代表了未来潜在运行任务的先驱,能够提供长期的地球气候记录。在成功完成可行A阶段之后,GEROS现已准备进入实施阶段,最终将于2020年发射。
文献来源:Jens Wickert, Estel Cardellach, Manuel Martin-Neira , et a., GEROS-ISS: GNSS REflectometry, Radio Occultation, and Scatterometry Onboard the International Space Station.IEEE Journal of Selected Toptics in Applied Earth Observations and Remote Sensing, 2016, 9(10), 4552-4581.
|
 空间地球科学及应用
空间地球科学及应用



| 版权所有 © 中国科学院空间应用工程与技术中心 中科院太空应用重点实验室 备案序号:京ICP备05002857号 京公网安备110402500056号 单位地址:北京市海淀区邓庄南路9号 邮编:100094 联系电话:010-82178814 E-mail:lsu@csu.ac.cn |
|